
ガンダムmk-Ⅱ(電動化)
- 9233
-
いいねしたモデラー(236)

- 12
-
MG ガンダムmk-Ⅱ に LED電飾と各関節駆動 + 基地風ジオラマ台座 作成工作をしました。スイッチ入力で各関節角度を自由に指示できる他、2パターンの固定演技も組み込みました。制作時期:’24/10【A11】
ロボットプラモデルが 自ら動き出したら・・・
という子供の頃の夢を、MGを題材に挑戦しました。
動く様子は下記動画にてご覧ください(↓)

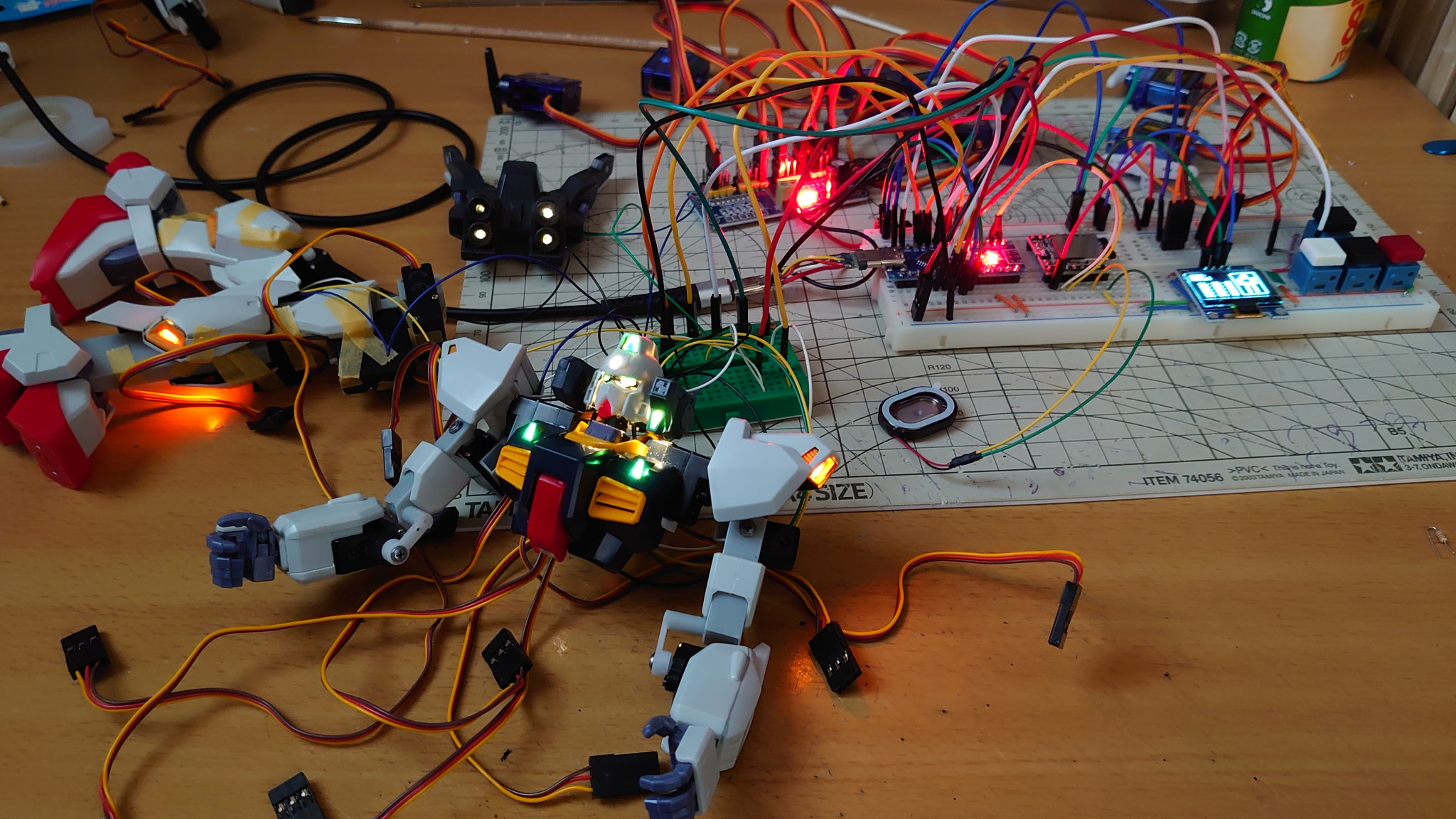
MS本体のセンサ部やバーニア部にLEDを組み込みました。
点灯/点滅など調光制御が可能です。
ポージングの幅を最大限&最小限の関節数 として選んだ”15関節”に航空ラジコン用の超小型サーボモータを組込みました。
関節部はWAVEの角プラパイプ等を使って可能な限りの軽量化を図り、モータの負荷低減をしています。

発艦時の”かがみ”姿勢
胴体関節も使って身体を前傾させています。

ビームライフル”射撃”姿勢
見切れていますが、ライフルの銃口も発光します。

頭部バルカン”射撃”姿勢
首振りと、バルカン部のLED発光&交換とを合わせています。

劇場版の”回し蹴り”
腰のひねり も再現できます。
これらの動きは2つのパターンで 効果音と共に自動再生 されます。
今後もパターンは追加可能です。

電源未投入時の”支え”としての台座には
キット付属のカミーユを置きました。整備中に見上げているイメージです
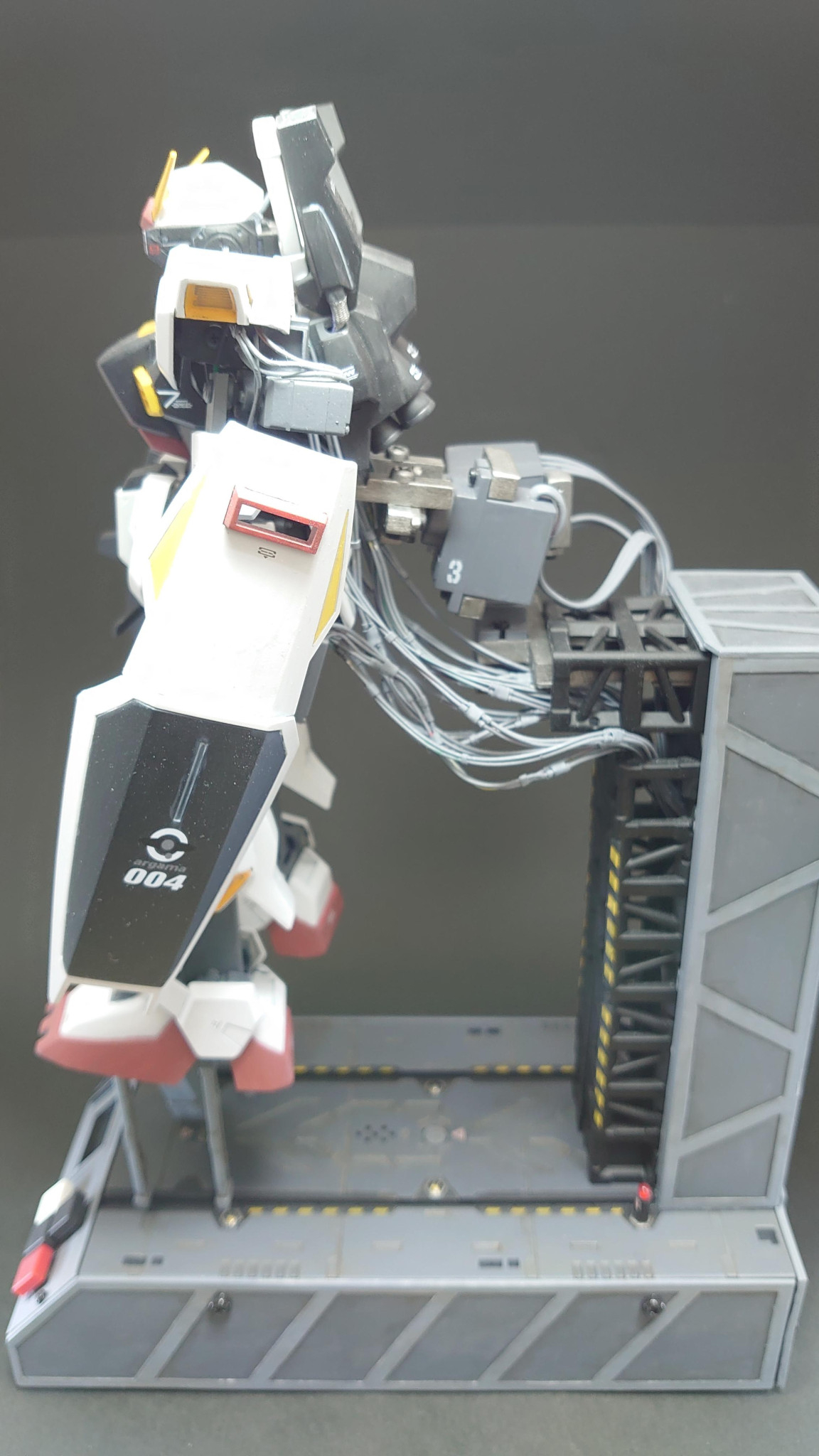
台座部から伸びるアーム部にも全3関節を設けました。
MS腰部と接続されていて、MS全体での より大きな動き ができるようにもしています。

配線は後部から 腕/足/胴体それぞれから台座部へ。
グレーに塗装してなるべく目立たないようにしています。
(次回作では)ここら辺をもっとスマートにしたいですね・・・
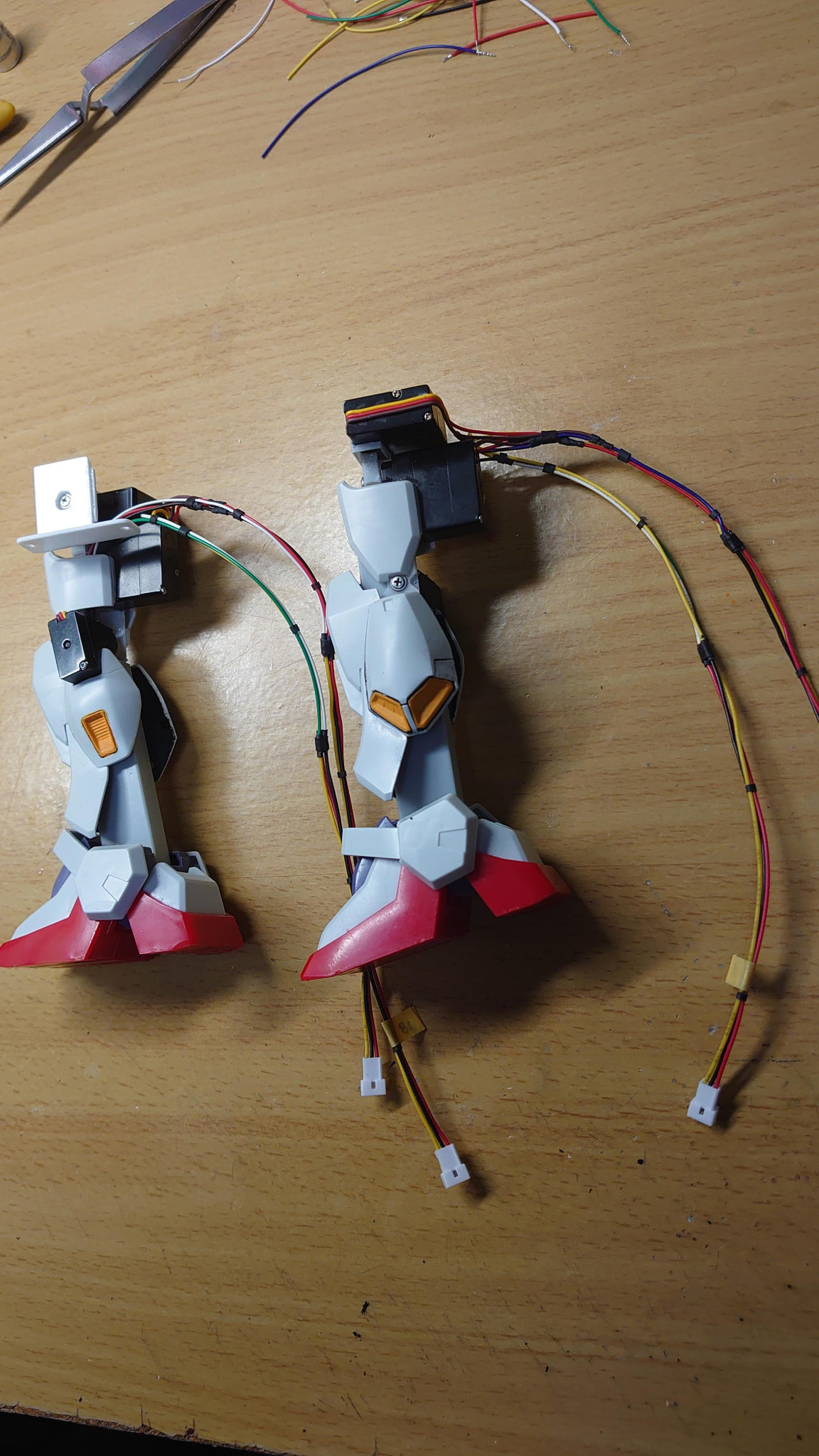
腕部の製作途中状態です。
位置を確かめながら、図を描きながら サーボの配置検討を進めます。
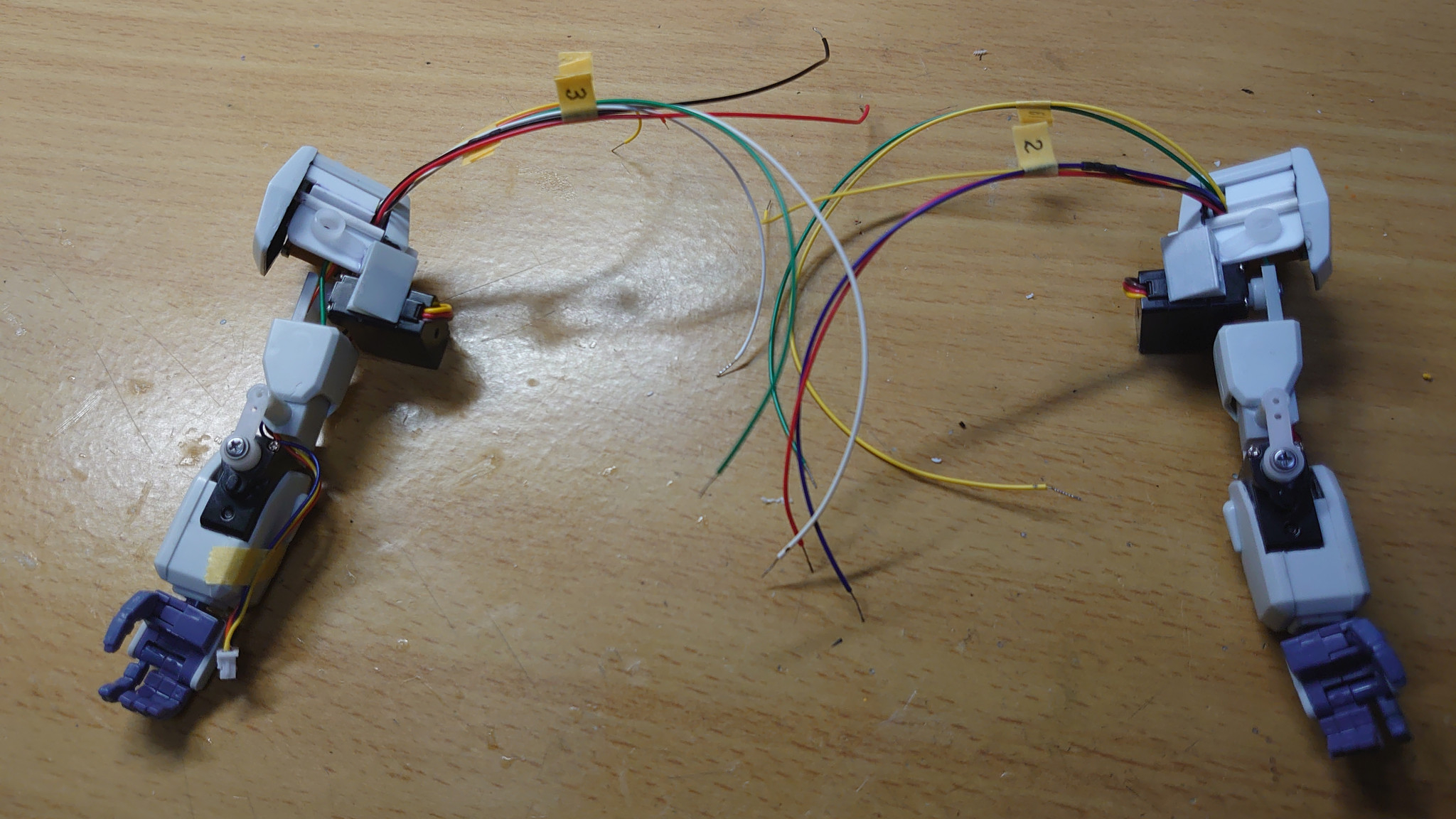
脚部の制作途中状態です。
どうしてもモータの一部は飛び出てしまいますが、
どうしたらなるべく目立たなくできるか?を考えながら、検討と工作を進めていきます。
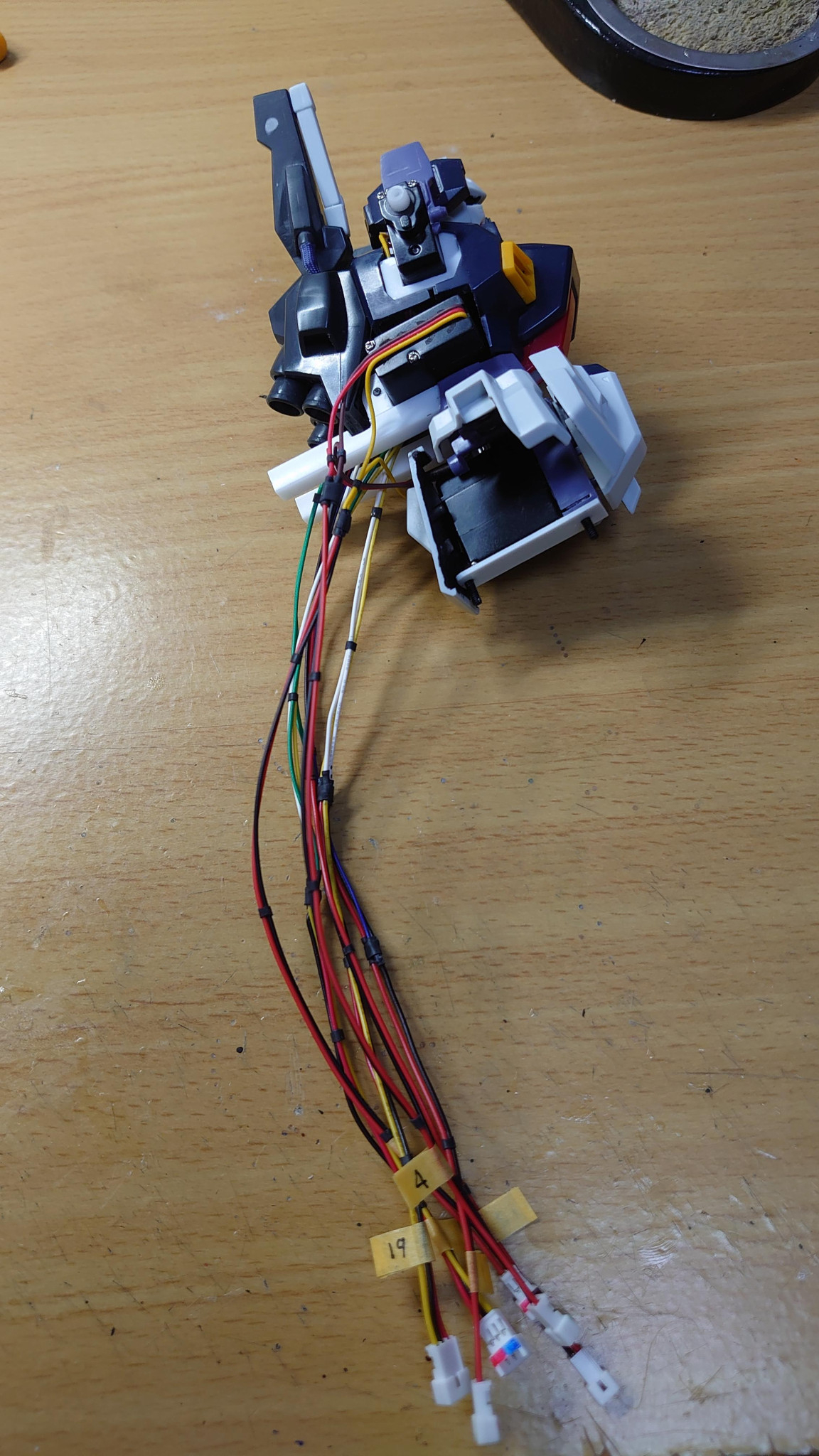
頭部/胴体部の制作途中状態です。
胴体にも かがみ と ひねり の2関節を入れています。(ここはちょっとこだわり箇所です)
配線チェック。
この時点で無事に導通していることを確かめておきます。大事な工程です。

台座部は100均のカタパルトをベースにプラ板/プラ棒などを組み合わせて作成しました。
MSを支える部分には荷重がかかるので、なるべく頑丈に工作しています。
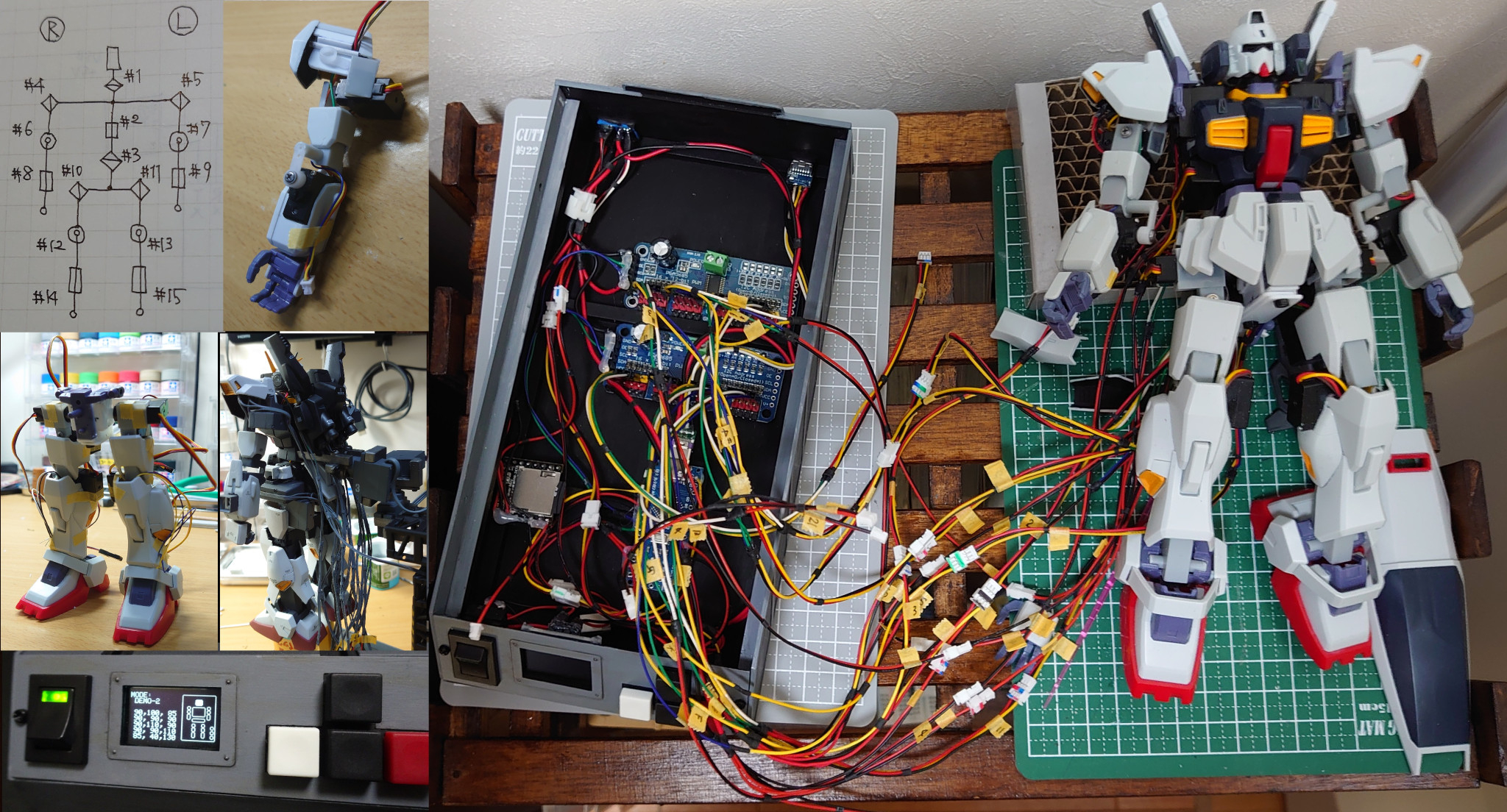
全体組み立て前の最終状態です。
台座部にArduino(マイコン)と音声出力基盤、小型スピーカー、モード切替スイッチ、状態表示ディスプレイ を組み込んでいます。
左上は今回組み込んだ15関節の配置図(手書き)です。

台座部も入れた全体像です。
メイン電源スイッチ、入力スイッチ群、各関節の状態ディスプレイ を
台座部の前面に配置しました。
4つの入力スイッチの役割は・・・
・白スイッチ:モード切替(2つのデモ、各関節指示のマニュアル)
・赤スイッチ:デモスタート or 各関節選択
・黒スイッチの上下:各関節の角度を増減

各モード および 各関節の姿勢情報 です。
***********
今できることを組み合わせて まずは作ってみました。
夢を実態化して一旦 満足 ではありますが、
まだまだ足りないところ、改良したい点もたくさんあります・・・
今後はもっとスムースかつ素早く動けるようにしていきたいと思います。
<その他関連作品の紹介ショート動画もご覧ください>
コメント
コメントをして応援しよう
コメントにはログインが必要です
matsucom250さん、遅れ馳せながらコメント失礼します🙇動画も拝見させていただいたのですが、とてつもない衝撃を受けました!MGにあれ程の量の配線や機構を仕込んで動かしてしまうとは驚愕です❗凄い!カッコいい!しか
言葉が見当たりません!もはや別次元の領域です。本当に素晴らしい作品を見させて頂き、
ありがとうございます!
コメントありがとうございます! 今後の制作の励みになります。
MGのサイズに収めようと思考錯誤した結果、なんとかこの状態にすることができました。
ただ、配線の複雑化は大きな課題でして ”もっと簡略できないか”、次回作以降で取り組んでいきたいと思っています!
誰もが言いたくて、でもベタ過ぎて言えてないこと言います。
「こいつ、動くぞ!?」
笑
スペース的に余裕が作れそうなPGではなくMG でっていうのがまたすごいと思います。
いいものを見せていただきました。
コメントありがとうございます! 今後の制作の励みになります。
おっしゃるように、MGのサイズはなかなかハードルが高かったです が、
Mk-Ⅱのデザインがもともと可動しやすいように考えられているせいか、
そこにだいぶ助けられた感じです。
これは凄い。作りはもちろん、動画の仕上げも。胸部とバルカンの点灯も好きです。今回はLED電飾だけでなく動いて発信してしまうとは胸熱です。背後から制御の配線がまとまっているのは、横浜のリアル動くガンダムを連想しますね。MGのサイズで関節を制御するサーボモータは何を使っていらっしゃるのでしょうか。このまま100倍の大きさにすると横浜ガンダムファクトリーMkⅡになっちゃいますね。素晴らしいものを見せて下さりありがとうございました!
コメントありがとうございます! 今後の制作の励みになります。
横浜ガンダムは自分も見に行きましたが、やはり人の形をしたものが動きだすとワクワクしてしまいますね・・・。
今後ももっとレベルアップをしていきたいと思います。
コメント失礼します。スゴい、スゴい、スゴい‼️もうまんまMSじゃないですか😲自分は超アナログ人間なのでコレはもう神の領域です。
コメントありがとうございます! 今後の制作の励みになります。
MSって関節毎にこういった機構が入っているとなると、
建造もそうですが、整備もめちゃくちゃ大変な代物ですよね・・・
今回15関節だけでしたが、それでも実感しました
凄いです。
因みに、ディスプレイはLCDですか?
OLED(有機EL)で、約1インチの超小型ディスプレイを使っています。某通販サイトですと数百円で購入できました。Arduino(マイコン)向けの制御用プログラム例がネットに色々上がっていますので、そちらを参考しています!
コメントありがとうございます! 今後の制作の励みになります。
サーボモータは小さいとなかなか大きな力とスピードが出ないので・・・
そこが次回の改善・改良すべき点かなと考えています。
道楽道 ~DO! LIKE DO!~ を合言葉に
気ままに作成しています。
主に 電子工作とプラモデルを融合した”電プラ”作品です。
matsucom250さんがお薦めする作品
ガンダムmk-Ⅱ(電動化)
リニアシート for RX-178
νガンダム ver.Ka
ドムヘッド エクシードモデル
ドムヘッド エクシードモデル に LED電飾とモノアイ駆動を…
リニアシート for RX-178
3Dプリントしたモデル に 電飾を組込みました。スイッチ入力…
GQ GELGOOG
HG GQ GELGOOG に 電飾を組込みました。スイッチ…
TOLRO800(トロハチ)
HG TOLRO800 を使って 電飾とミニジオラマ作成をし…