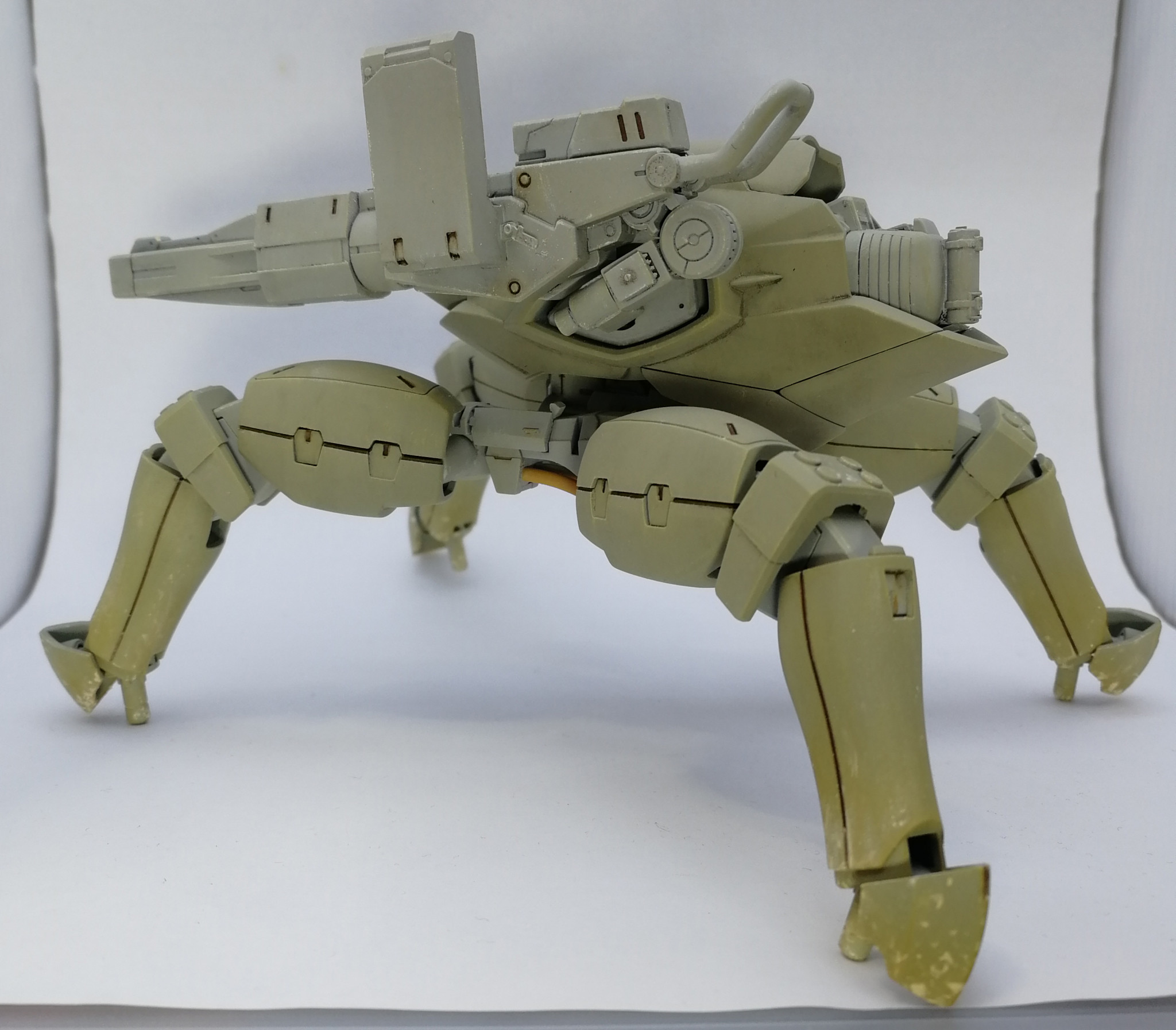
リーオー足が4本になったのでさっくり四足機に仕立ててみました。
1/35スケールぐらいのつもり。姿勢によって3~5mぐらいですかね。
ザンブーラキの名はアラビア圏の銃装駱駝騎兵から。
この写真はトリックではなく実際に崖みたいな角度に立てて撮影してみました。
こんな感じでグリムゲルデ脛が可動してかなり急角度まで本体の水平保って立てます。
設定的なアレ
人間のモーションデータからの姿勢制御プリセット出力による
運動システムの半自動化により他の歩行型に大きく先じた二脚型WTだが
そのWTの運用データを元に時間をかけた最適化により多脚型へと発展した機種がわずかながら存在する。
本機もその一つ、第三世代への機種転換に伴いサイレントオルカをベースに開発されたザンブーラキである。
本機は元より砲狙撃任務に特化した機体として汎用性は捨てた設計がされており
仕様ごとに交換は可能であるものの、マニピュレーターは持たず
固定装備された主砲とセンサーユニットによって構成されたメインアームと
2-4脚歩行システムを持つ。
2-4脚とは一対の前部が大きくスイングする股関節とそこから生える四本の脚部ユニットを指す。
この機構により前足となる脚部ユニットは上下に大幅な可動範囲を持ち、
山岳部の崖面をはじめとする、これまで射程圏内にありながらも狙撃不可能だった地点からの
精密砲狙撃を可能とした。
これにより目標から見渡せる全ての山が狙撃地点になり
相手の陣地設営の自由度は大きく制限されるものと期待される。
汎用性捨てて狙撃に特化した機体って感じ。
人間モーションからのデータ流用が出来ないのであらかじめ用意された限定的な動作しか取れず
格闘戦なんかはもってのほか。
完全に砲兵科専用の機体です。
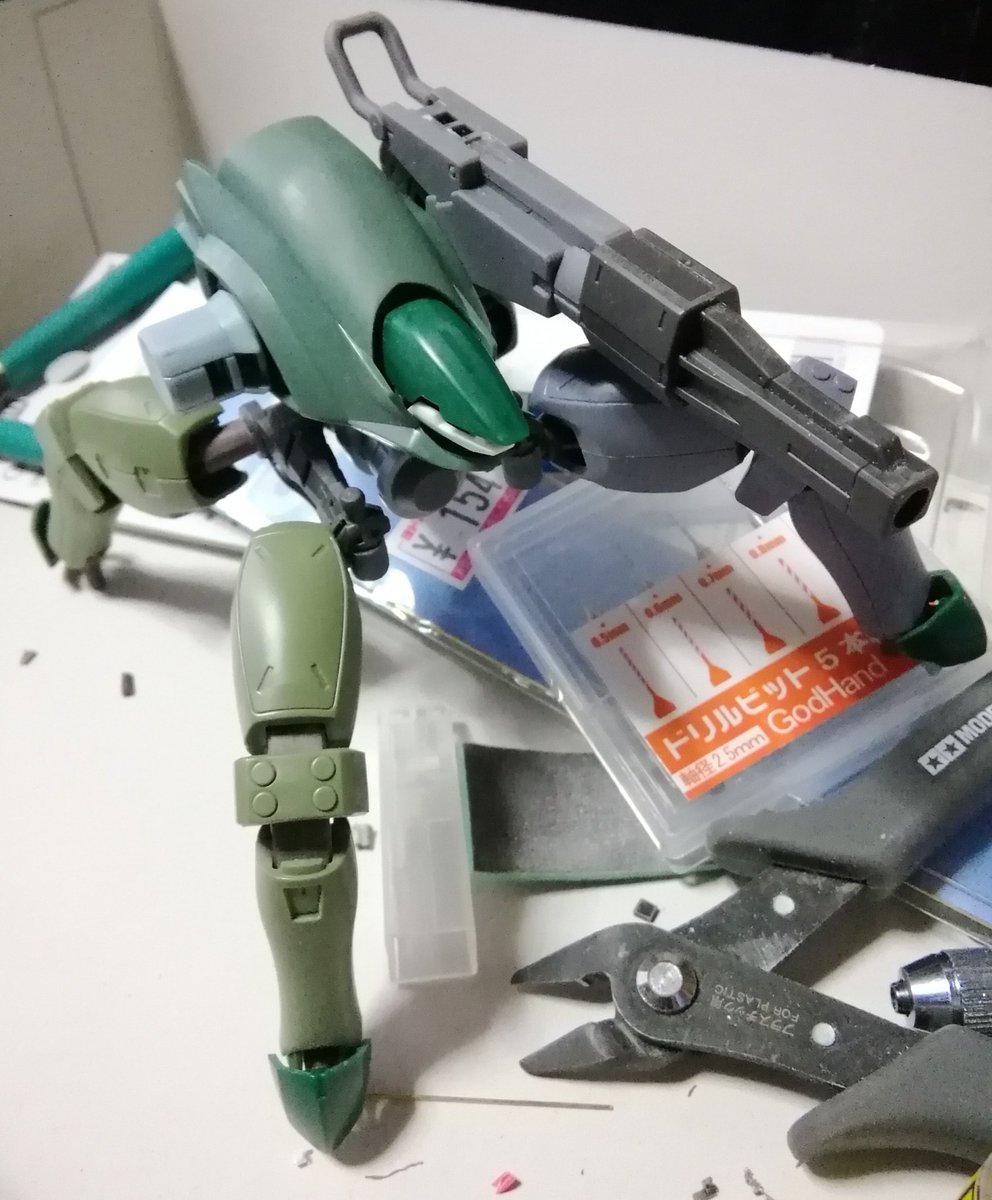
主にダナジンの胴とリーオーの足。
頭はレギンレイズ。
股間はダイバーズキャンペーン武器とグリムゲルデの脛フレーム。
砲は主に鉄血武器セットを混ぜて構成。
右のセンサーポッドはリーオーNPD頭。
これいっぱい欲しい。
背面の何かのユニットはリーオーの頭です。
作戦中はこのように姿勢を下げて運用されることが常態。
基地内を初めとする障害物の多い場所での歩行形態。
展示会等を除けば平時にマニアが実際に見られるのは基本的にこの形態であり
格好悪いとすこぶる評判が悪いがザンブーラキという名は開発中にこの形態を視察した
将軍によってつけられたものである。
蜘蛛でも蟹でもなく駱駝。
大体これぐらいのサイズ感です。










リーオー足が4本になったのでさっくり四足機に仕立ててみました。
コメント
コメントをして応援しよう
コメントにはログインが必要です
ガンプラでオリジナルロボ作るマン
オラの時空の78ガンダム
自分好みのファーストガンダムとすべくオラ解釈で体格とエッジの…
ロディランザ
マンロディ胴にディランザの頭でロディランザです。他にケンプフ…
五星球
ウーシンチュウ。世界的大人気アニメドラグーンバレルに登場する…
ザウルデ
ザウォート+ルブリスウル+デミ+ルブリスでミキシング。1/3…